Hierarchical State Machine (HSM)¶
See the rendered version of this document here.
Credit¶
The design and implementation of the HSM library is heavily inspired by Practical UML Statecharts in C/C++: Event-Driven Programming for Embedded Systems 2nd Edition by Miro Samek.
Glossary¶
- event
a unique ID plus optionally some data associated with it
- entry event
an event sent to a state when the state is entered. The state can optionally run entry actions on it. The event has ID
AM_EVT_ENTRY.- exit event
an event sent to a state when the state is exited. The state can optionally run exit actions on it. The event has ID
AM_EVT_EXIT.- external transition
An external transition is a transition that moves from one state to another, possibly re-entering the same state. The source state is exited, the target state is entered and initialized. Synonym of state transition.
- init event
an event sent to a target state, right after the state was entered. The state can optionally trigger transition to a substate on it. The event has ID
AM_EVT_INIT. It immediately follows the entry event.- internal transition
An internal transition is a transition that occurs within a state without causing an exit and re-entry.
- state
an event handler. s1, s11, s111, s12, s121, s2, am_hsm_top are all states (see state diagram in Example HSM section below)
- current state
the state which currently receives incoming events
- active state
same as current state
- state transition
the process of changing of the current state to another or to itself
- source state
the state that initiates the state transition
- target state
the destination state of the state transition
- initial transition
the state transition that may optionally happen after entering a state, if the state is a target state of the state transition. In the state diagram Example HSM section below the state s12 has the initial transition, whereas state s11 does not. The initial transition in the state s12 is only activated, if the state s12 is the target state of a state transition. For example, if s11 triggers the transition to s12, then the initial transition is activated. However if s11 triggers the transition to s1, then the initial transition in s12 is not activated.
- superstate
an HSM state that is a parent (ancestor) of one or more other states (children, substates). s1, s11, s12, am_hsm_top are all superstates. Whereas s2 is not as it is not a parent of any state(s).
- top (super)state
the ultimate root of the state hierarchy. It is predefined by
am_hsm_top()state.- substate
a state that has a superstate as its parent (ancestor). A state can be substate and superstate simultaneously. s1, s11, s111, s12, s121, s2 are all substates (see state diagram in Example HSM section below).
- child state
same as substate
- parent state
same as superstate
- ancestor state
same as superstate
- ancestor chain
the parent-child relation chain from a state to the top level superstate. In the state diagram in Example HSM section below s11-s1-am_hsm_top is the ancestor chain. Another one is s2 - am_hsm_top etc.
- nearest common ancestor (NCA)
the first common ancestor in two ancestor chains constructed from source and target states to the top level superstate. For example, given the state diagram in Example HSM section below:
for s11-s1-am_hsm_top and s2-am_hsm_top the NCA is am_hsm_top
for s111-s11-s1-am_hsm_top and s12-s1-am_hsm_top the NCA is s1
for s111-s11-s1-am_hsm_top and s11-s1-am_hsm_top the NCA is s1
- topology
HSM topology is the architecture of HSM - the set of all parent - child relations between HSM states
Introduction¶
HSM differs from a Finite State Machine (FSM) in that a state can have a parent state that can be used to share behavior via a mechanism similar to inheritance, which is called behavioral inheritance. The parent-child relationship between states impacts both event handling and transitions.
The HSM is a combination of one or more state-handler functions of
type am_hsm_state_fn.
Example HSM¶
In order to explore how event handling and transitions work in an HSM, consider the below state machine:
![@startuml
[*] --> s1
state am_hsm_top #LightBlue {
state s1 #LightBlue {
state s11 #LightBlue {
state s111 #LightBlue
}
state s12 #LightBlue {
[*] --> s121
state s121 #LightBlue
}
}
state s2 #LightBlue
}
@enduml](_images/plantuml-5ce7a5a96f0606df27f5624dae16660d3db48389.png)
State Relations¶
States s11 and s12 are children of s1. States s111 and s121 are children
of s11 and s12, respectively. State s2 has no children.
Both s1 and s2 have the default parent am_hsm_top provided by
the library (am_hsm_top()).
Event Dispatching¶
Event dispatching is always done by calling am_hsm_dispatch()
function. It takes state machine as first parameter and event to dispatch
as second parameter.
The dispatching is the synchronous procedure, which means that by the time the function returns the event is processed by the state machine. If event triggers a state transition, then the state transition including all exit, entry and init actions are also complete.
Event Propagation¶
Events are always sent first to the active state. The active state can choose
whether to consume the event or to pass it to its parent. If the state
chooses to consume the event then event handling ends with the state. If,
however, the state chooses to pass, then the event will be sent to the state’s
parent. At this point the parent must make the same decision. Event handling
ends when the state or one of its ancestors consumes the event or the event
reaches the default superstate am_hsm_top(). The default top level
superstate am_hsm_top() always returns
AM_RC_HANDLED for
all events meaning that it is consumed.
Assume that the state s111 shown in the state diagram in Example HSM above
is active and an event is sent to the state machine. State s111 will be the first
state to receive this event. If it chooses to pass then, the event will be sent
to state s11, which is its direct parent. If state s11 also chooses to pass,
then the event will finally be sent to state s1. If s1 chooses to pass, then
the event is consumed by am_hsm_top().
am_hsm_top (am_hsm_top()) does nothing with events and serves as
the ultimate event propagation termination point.
To inform the library that an event is handled the event handler function
must return AM_HSM_HANDLED().
To inform the library that an event is passed to superstate the event
handler function must return AM_HSM_SUPER(), which provides the
name of the superstate event handler.
State Transition¶
When transitioning it is important to distinguish the current state and the source state. They are not necessarily the same state.
In the state diagram in Example HSM above consider the case when the current state is s111, an event is received by s111 and passed first to the superstate s11 and then to the superstate s1, which decides to make a transition to the state s2. In this case the current state is s111, the source state is s1 and the target state is s2.
When transitioning, exit events
(AM_EVT_EXIT) are sent
by the library automatically up the ancestor chain until reaching the nearest
common ancestor (NCA) of the source and target states.
Then, entry events (AM_EVT_ENTRY)
are sent automatically by the library down the ancestor chain to the target state.
Finally the library sends the init event
(AM_EVT_INIT) to the target state.
The NCA does not receive the exit event nor does it receive the entry and init events.
There is a special case when the source and target states match (a self-transition). In this scenario the source state will be sent the exit and then the entry event followed by the init event.
For example, if s111 is the source state and s121 is the target state, then the NCA is state s1. This means that the exit events are sent to s111 and s11 and then the entry events are sent to s12 and s121. Then the init event is sent to s121.
If s11 is the source state and s2 is the target state, then the NCA is the default top level state am_hsm_top, so exit events are sent to s11 and s1 and then an entry event is sent to s2. Then the init event is sent to s2.
If s111 is the source state and the target state, this exercises the special case of the self-transition. So s111 will be sent the exit event then the entry event followed by the init event.
If s111 is the current state and the transition is initiated by s1 with the target state s1, then NCA is s1, the exit events are sent to s111, s11, s1 and then the entry event is sent to s1 followed by the init event.
If s111 is the current state and the transition is initiated by s111 with the target state s1, then NCA is s1, the exit events are sent to s111, s11 and then the init event is sent to s1. Please note that the state s1 is not exited in this case.
To initiate a transition the state handler function must return
AM_HSM_TRAN() or AM_HSM_TRAN_REDISPATCH() pointing
to target state.
If state handler function returns AM_HSM_TRAN_REDISPATCH() pointing
to target state, then the transition is executed first and then the same event is
dispatched to the new current state in the same am_hsm_dispatch() call.
This is a convenience feature, that allows HSM to handle the event in
the state that expects it.
HSM states cannot initiate state transitions when processing entry and exit
events. This means that the HSM states cannot return AM_HSM_TRAN()
or AM_HSM_TRAN_REDISPATCH() pointing to target state.
Initial State Transition¶
If s111 is the current state and the transition is initiated by s1 with the target state s12, then NCA is s1, the exit events are sent to s11, s1 and then the entry event is sent to s12 followed by the init event. The init event triggers the initial state transition to s121. So, the entry event is sent to s121 followed by the init event.
If s121 had an initial transition, then that transition would be executed too in a similar manner all the way down the hierarchy chain until target state does not do initial transition anymore.
The initial state transition must necessarily target a direct or transitive substate of a given state. An initial transition cannot target a peer state or go up in state hierarchy to higher-level states.
For example, the initial transition of state s12 can only target s121 and no any other state.
Initial State¶
In addition to regular states every HSM must declare the initial state, which the HSM library invokes to execute the topmost initial transition.
The initial state is entered, when calling am_hsm_init() function.
The initial state must always return AM_HSM_TRAN() pointing to
target state.
The transition from the initial state to the target state is done by
the time am_hsm_init() exits.
HSM Initialization¶
HSM initialization is divided into the following two steps for increased flexibility and better control of the initialization timeline:
the state machine constructor (
am_hsm_ctor())the top-most initial transition (
am_hsm_init()).
HSM Topology¶
HSM library discovers the user HSM topology at run time by sending
AM_EVT_EMPTY event to state event handlers.
The state event handlers should always return
AM_HSM_SUPER() in response.
HSM Coding Rules¶
HSM states must be represented by event handlers of type
am_hsm_state_fn.The name of the first argument of all user event handler functions must be me.
For convenience instead of using struct
am_hsm*me the first argument can point to a user structure. In this case the user structure must have structam_hsminstance as its first field.For example, the first argument can be struct foo *me, where struct foo is defined like this:
struct foo { struct am_hsm hsm; ... };
The event handler in this case could look like this:
enum am_rc foo_handler(struct foo *me, const struct am_event *event);
Each user event handler should be implemented as a switch-case of handled events.
Avoid placing any code with side effects outside of the switch-case of event handlers.
Processing of
AM_EVT_ENTRYandAM_EVT_EXITevents should not trigger state transitions. It means that user event handlers should not returnAM_HSM_TRAN()orAM_HSM_TRAN_REDISPATCH()for these events.Processing of
AM_EVT_INITevent can optionally only trigger transition by returning the result ofAM_HSM_TRAN()macro. The use ofAM_HSM_TRAN_REDISPATCH()is not allowed in this case.Processing of
AM_EVT_INITevent can optionally only trigger transition to a substate of the state triggering the transition. Transition to peer states of superstates is not allowed in this case.Processing of
AM_EVT_INIT,AM_EVT_ENTRYandAM_EVT_EXITevents should be done at the top of the corresponding event handler for better readability.
Transition To History¶
Transition to history is a useful technique that is convenient to apply in certain use cases. It does not require to use any dedicated HSM library API.
Given the state diagram Example HSM section above the transition
to history technique can be demonstrated as follows. Assume that the HSM
is in the state s11.
On entry to the state user code stores the state in a local variable
of type struct am_hsm_state. This is done with:
struct foo {
struct am_hsm hsm;
...
struct am_hsm_state history;
...
};
...
static enum am_rc s11(struct foo *me, const struct event *event) {
switch (event->id) {
case AM_EVT_ENTRY:
me->history = am_hsm_get_state(&me->hsm);
return AM_HSM_HANDLED();
...
}
return AM_HSM_SUPER(A);
}
Then the transition to state s2 happens, which is then followed by a request to transition back to the previous state. Since the previous state is captured in me->history the transition can be achieved by doing this:
static enum am_rc s2(struct foo *me, const struct event *event) {
switch (event->id) {
case HSM_EVT_FOO:
return AM_HSM_TRAN(me->history.fn, me->history.instance);
...
}
return AM_HSM_SUPER(am_hsm_top);
}
So, that is essentially all about it.
Another example of the usage of the transition to history technique can be seen in tests/history.c unit test.
Submachines¶
Submachines are reusable HSMs. They can be as simple as one reusable state. The more complex submachines can be multi state interconnected HSMs.
The main purpose of submachines is code reuse.
Here is an example of submachine with one reusable state s1. It shows two instances of s1 called s1_0 and s1_1.
![@startuml
[*] --> s
state am_hsm_top #LightBlue {
state s #LightBlue {
state s1_0 #LightBlue {
[*] --> s2
state s2 #LightBlue
}
state s1_1 #LightBlue {
[*] --> s3
state s3 #LightBlue
}
}
s --> s1_0 : FOO
s --> s1_1 : BAR
s --> s : BAZ
}
@enduml](_images/plantuml-4153f2d3b0a957188b531f361a1d4a612f3e2152.png)
Here is how it is coded in pseudocode:
/* s1 submachine instances */
#define S1_0 0
#define S1_1 1
struct sm {
struct am_hsm hsm;
...
};
static enum am_rc s(struct sm *me, const struct event *event) {
switch (event->id) {
case FOO:
return AM_HSM_TRAN(s1, /*instance=*/S1_0);
case BAR:
return AM_HSM_TRAN(s1, /*instance=*/S1_1);
case BAZ:
return AM_HSM_TRAN(s);
...
}
return AM_HSM_SUPER(am_hsm_top);
}
static enum am_rc s1(struct sm *me, const struct event *event) {
switch (event->id) {
case AM_EVT_INIT: {
static const struct am_hsm_state tt[] = {
[S1_0] = {.fn = AM_HSM_STATE_FN_CTOR(s2)},
[S1_1] = {.fn = AM_HSM_STATE_FN_CTOR(s3)}
};
int instance = am_hsm_get_instance(&me->hsm);
AM_ASSERT(instance < AM_COUNTOF(tt));
return AM_HSM_TRAN(tt[instance].fn);
}
...
}
return AM_HSM_SUPER(s);
}
static enum am_rc s2(struct sm *me, const struct event *event) {
...
return AM_HSM_SUPER(s1, S1_0);
}
static enum am_rc s3(struct sm *me, const struct event *event) {
...
return AM_HSM_SUPER(s1, S1_1);
}
Please note that any transitions between states within submachines as well as
all references to any submachine state via AM_HSM_SUPER() must be done
with explicit specification of state instance, which can be retrieved by
calling am_hsm_get_instance() API.
The complete implementation of the given submachine example can be found in tests/submachine/basic/test.c
A submachine (sub)state can also be a superstate of itself, which creates a recursion. The example of the submachines recursion can be seen in tests/submachine/complex/submachine.c.
HSM Examples And Unit Tests¶
Regular State Machine¶
The example HSM state diagram exercised by the test was borrowed from the book Practical UML Statecharts in C/C++: Event-Driven Programming for Embedded Systems 2nd Edition by Miro Samek.
The source code of the test is in regular.c.
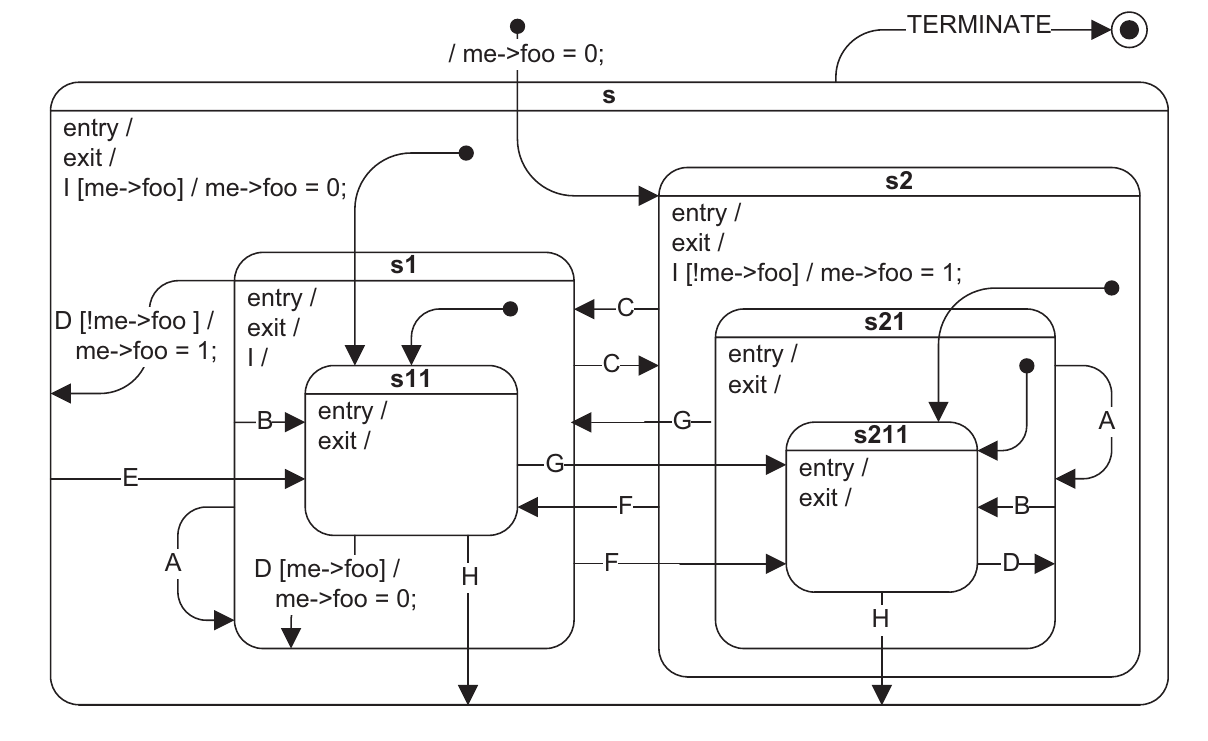
This is a contrived hierarchical state machine that contains all possible state transition topologies up to four level of state nesting.
There is command line tool in example.c. It allows to explore the behavior of the state machine by generating all possible events, activating all existing states and observing state transition sequences: exit, entry and init events generated by the library.
HSM With Event Queue¶
Different libraries are mixed together to demonstrate:
the use of event queue with HSM
how HSM can send events to itself
how the events sent to itself are then dispatched back the the HSM
how events can be allocated on stack or from event memory pool
how the events allocated from the memory pool are then freed by the event library
The key libraries at play here are:
The source code is in event_queue.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s1
state am_hsm_top #LightBlue {
state s1 #LightBlue
state s2 #LightBlue {
}
s1 --> s2 : A
}
s1 : B /
s2 : C /
@enduml](_images/plantuml-420f01bc399d837cc6d4809a16191eec669d5eee.png)
, where
A is short of HSM_EVT_A
B is short of HSM_EVT_B
C is short of HSM_EVT_C
The test steps:
Construct the HSM by calling hsmq_ctor(). The HSM construction includes the HSM event queue setup.
Initialize the HSM. The init state transition activates hsmq_s1.
Enter the cycle of injection of external events with ID listed in in[] array: AM_EVT_A and AM_EVT_C. The injection is done by calling
am_hsm_dispatch()followed by hsmq_commit() call. The hsmq_commit() call goes though all events in HSM event queue and dispatches them one by one until the queue is empty.Each external event is associated with constant string of expected event processing steps in the HSM. The association is listed in the array of struct hsmq_test items. The constant strings are then compared to the actual HSM event processing log generated by HSM with me->log() calls.
Defer¶
Test simple HSM with event queue and deferred event queue.
The source code is in defer.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s1
state am_hsm_top #LightBlue {
state s1 #LightBlue
state s2 #LightBlue
}
s1 : A / defer
s1 : X / recall
s1 --> s2 : B
s2 : A /
@enduml](_images/plantuml-dda078e01f1a22eafc3ae62789a90420e92a5da7.png)
, where
A is short of HSM_EVT_A
B is short of HSM_EVT_B
X is short of
AM_EVT_EXIT
The test steps:
Initialize the HSM. The init state transition activates s1
Send A event, which triggers an internal transition in s1 by deferring the event.
Send B event, which triggers an external transition to s2 and recalls A on exit.
Event A is handled in s2.
All internal and external transitions in HSM are logged and compared against expected patterns stored in struct test::out.
HSM Destructor¶
Tests am_hsm_dtor() API.
The source code is in dtor.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s
state am_hsm_top #LightBlue {
state s #LightBlue
}
@enduml](_images/plantuml-4c55bbcf841e3bd23d4274af9f1e58963cc5d359.png)
The test steps:
Initialize the HSM. The init state transition activates s.
Call
am_hsm_dtor()for the HSM and check if it destructs the HSM.
HSM History¶
Demonstrates the HSM history pattern usage modeling the operation of a microwave oven.
The source code is in history.c.
The HSM topology:
![@startuml
left to right direction
[*] --> open : door open
[*] --> closed : door closed
state am_hsm_top #LightBlue {
state closed #LightBlue {
[*] --> H
H --> off
state H <<history>>
state on #LightBlue
state off #LightBlue
}
state open #LightBlue
}
open --> closed : close door
closed --> open : open door
on --> off : ON
off --> on : OFF
@enduml](_images/plantuml-7b9d0c139b0d59731a214493b70e0bb73e0c7041.png)
The test steps:
Initialize the HSM. The init state does two things:
sets history state to off
requests transition to either open or closed state depending on whether the oven door is open or closed. The oven door is closed. So, the transition is done to closed state and off substate.
Check that the current state is off.
Send ON event. Check that the current state is on.
Send OPEN event. Check that the current state is open.
Send CLOSE event. Check that the current state is on.
am_hsm_top() as NCA¶
Demonstrates the use of am_hsm_top() as the nearest common ancestor (NCA).
The source code is in hsm_top_as_nca.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s1
state am_hsm_top #LightBlue {
state s1 #LightBlue {
[*] --> s11
state s11 #LightBlue
}
state s2 #LightBlue
}
s11 --> s2 : A
@enduml](_images/plantuml-72687adcae1366e2ab14b0c7f4245439c094d8dd.png)
The key thing to notice here is that NCA of s11 and s2 is am_hsm_top().
The test checks that the transition from s11 to s2 is done correctly on the reception of the event A.
HSM Event Redispatch¶
Demonstrates the use of event redispatch with the AM_HSM_TRAN_REDISPATCH() macro.
The source code is in redispatch.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s1
state am_hsm_top #LightBlue {
state s1 #LightBlue
state s2 #LightBlue
}
s1 --> s2 : A
s1 : B / me->foo2 = 2
s2 --> s1 : B
s2 : A / me->foo = 1
@enduml](_images/plantuml-839d667b931539a8d7546e363533acbe4791e0c3.png)
Notice in the source code how event A is re-dispatched to a new state s2
using AM_HSM_TRAN_REDISPATCH() macro and then handled in the new state.
Same happens with the event B in the state s2.
HSM State Reenter¶
Demonstrates HSM state reenter with corresponding entry and exit actions performed on the state transition.
The source code is in reenter.c.
The HSM topology:
![@startuml
left to right direction
[*] --> s
state am_hsm_top #LightBlue {
state s #LightBlue {
[*] --> s1
state s1 #LightBlue
}
}
s --> s : A / log("s-A;")
s1 --> s1 : B / log("s1-B;")
s1 --> s : C / log("s1-C;")
s : E / log("s-ENTRY;")
s : X / log("s-EXIT;")
s1 : E / log("s1-ENTRY;")
s1 : X / log("s1-EXIT;")
@enduml](_images/plantuml-a23b7f2751dcfa97628eeabc0fa7f799111c6636.png)
The test checks that given events generate the expected sequence of actions:
event: A, actions: s-A;s1-EXIT;s-EXIT;s-ENTRY;s1-ENTRY;
event: B, actions: s1-B;s1-EXIT;s1-ENTRY;
event: C, actions: s1-C;s1-EXIT;s1-ENTRY;
For example, notice how the processing of the event A triggers exit from s1 and s with subsequent entry into the same states.